Understanding 'Lidar' technology and the reanalysis of the Lidar 'point cloud'
The design and production of this pamphlet were made possible through funding from the UK Arts and Humanities Research Council, provided as part of a CHASE doctoral studentship held by Goldsmiths Politics Doctoral researcher Emily Gresham Beamer. The pamphlet design and illustration were created by Emily Cox Illustrations.
This pamphlet is shared under a Creative Commons Attribution-NonCommercial 4.0 International Licence.
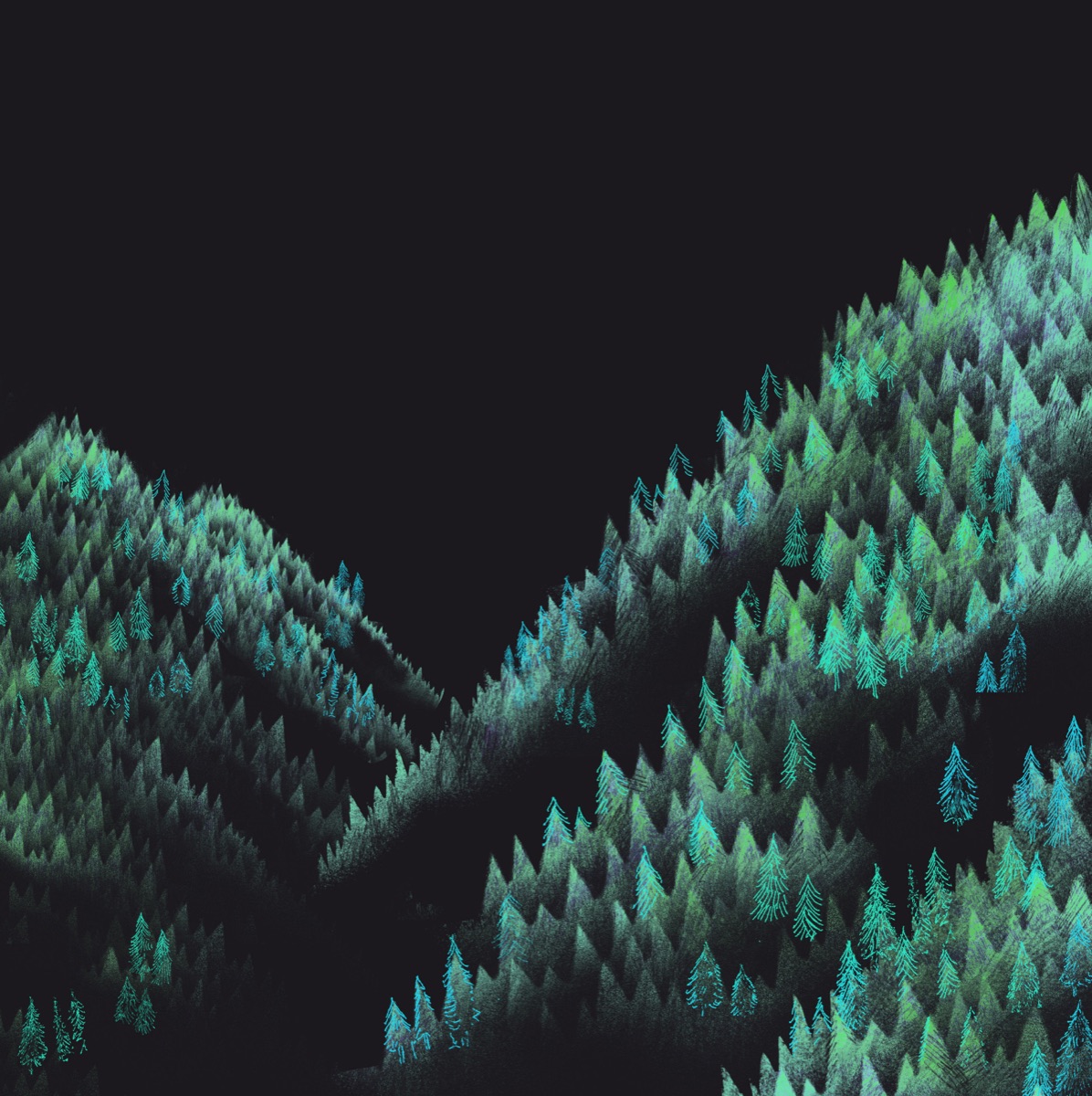
Aerial Lidar (Light Detection and Ranging) is a light-reflection based mapping technology that can be attached to drones, planes, and in some cases, satellites. When Lidar systems are attached to aerial vehicles above a landscape, they can create a three-dimensional image of it composed using light reflection points. This is achieved by the system pulsing light in rapid succession, which is then recorded according to where points of reflection occur. Lidar systems use time-based techniques to determine where the reflection occurred, measured alongside the angle, and amount of light returning. These three-dimensional images, known as point clouds, are then composed of light reflection points. Lidar point clouds can include points of reflection from space under a tree's canopy. Lidar reflections can also trace roads, rivers, footpaths, and man-made structures not visible from aerial photographs.
This pamphlet explains:
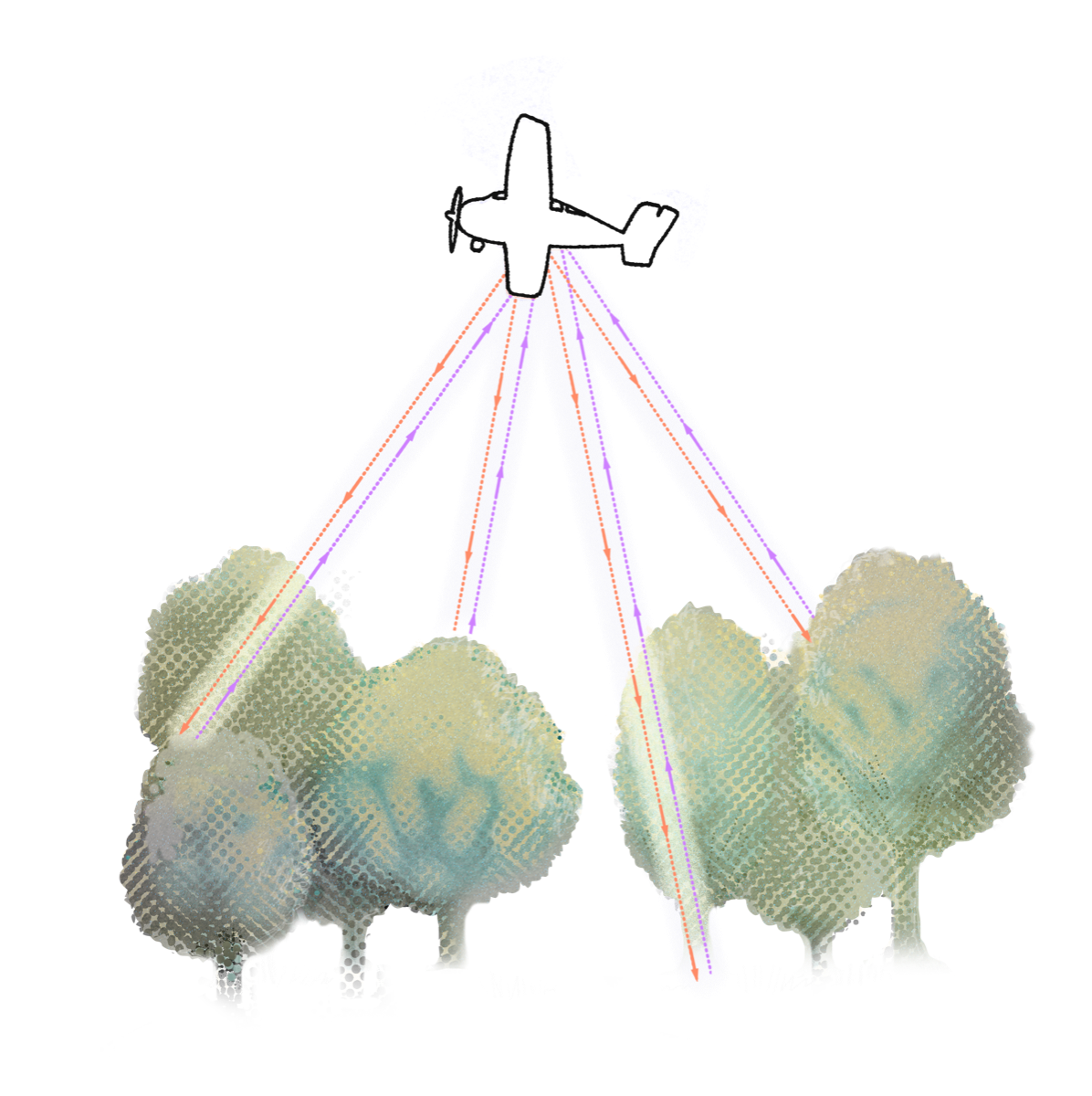
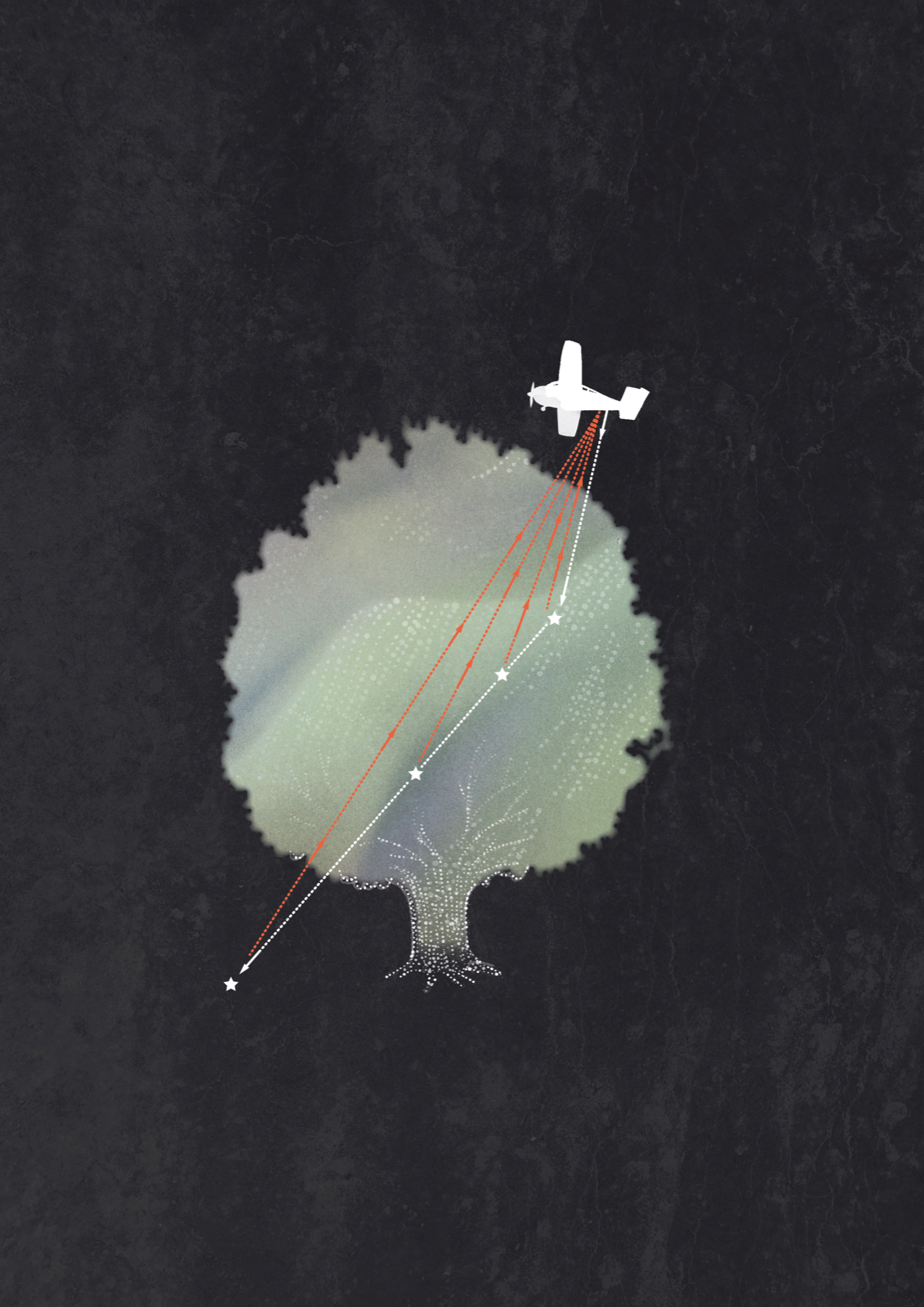
Light Detection and Ranging, or 'Lidar', is the practice of sending pulses of light towards a remote surface, and detecting the reflection of this light pulse upwards once it hits a surface. Lidar systems can record the time each light pulse has taken to return to the aerial Lidar system's light sensor. The time it takes for each light pulse to return to the sensor is then used to calculate the distance between the Lidar system and the surface the pulsed light is returning from in 'reflection'. This is recorded alongside a measurement of the amount, or intensity of the light energy reflecting upwards from each pulse.
When Aerial Lidar systems operate above landscapes, landscape surfaces, including the ground, can be reflected by a Lidar system from the air above, without entering an area on foot. These reflections can come from many different surfaces. Reflections may come from the leaves and branches of a tree, the ground of the earth, buildings or small structures, and under-canopy landscape features such as crevasses and caves. While very dense tree canopies may hinder ground reflections, in most forest areas Lidar systems can record reflections underneath tree canopy.
A highly detailed model of an area can be created when all of these reflections are collected, and then arranged in three-dimensions based on these time-based calculations of distance. Collected together, these reflections form a three-dimensional representation of landscape, known as a 'point cloud', as each reflection is then recorded by the sensor as a 'point' in space.

These light pulses are fast. Modern Lidar systems can pulse light tens of thousands to over a million pulses per second depending on the system. When these millions of reflection points are arranged together into a point cloud, a highly detailed representation of landscape can then be both represented and remotely interacted with.
Again, the three-dimensionality of the point cloud is possible because each reflection time is recorded to calculate this 'distance' based on the time taken for the light to reflect and return to the Lidar system after it has been pulsed downward. The sensor records both the reflection point's position and the intensity of the light reflection from the surface. The light intensity of a reflection can offer information about the character of the surface from which light is being reflected. Further analysis can classify each point by surface-type. Common classifications include vegetation type, structures, ground terrain, and water bodies.
Crucially, these three-dimensional point clouds can include points of reflection from spaces previously sheltered from aerial images by the canopy of trees. The Lidar system's pulsed light can cascade downward as it splits and reflects from multiple surfaces through forest canopy, reaching the ground, and reflecting back up to the sensor.
Returns are ordered by the time taken to reflect back up to the sensor. The first return typically represents the highest surface, while later returns may represent lower vegetation or the ground.
The shape of terrain, the mark of a trail, areas cleared of underbrush, and even archaeological features below forest canopy can now appear in virtual representation in the point cloud's collected reflections.
Points of reflection in a point cloud may be separated according to the object, surface type, and height where they reflected. This is usually conducted through the application of a series of algorithmic operations to the point cloud. Another common process used in the analysis of Lidar point clouds is the reprojection of the point cloud's often clustered and irregular spacing of reflections into a regularly spaced grid. These models are known as 'rasterised' Lidar models. Below are two common models created in this way.
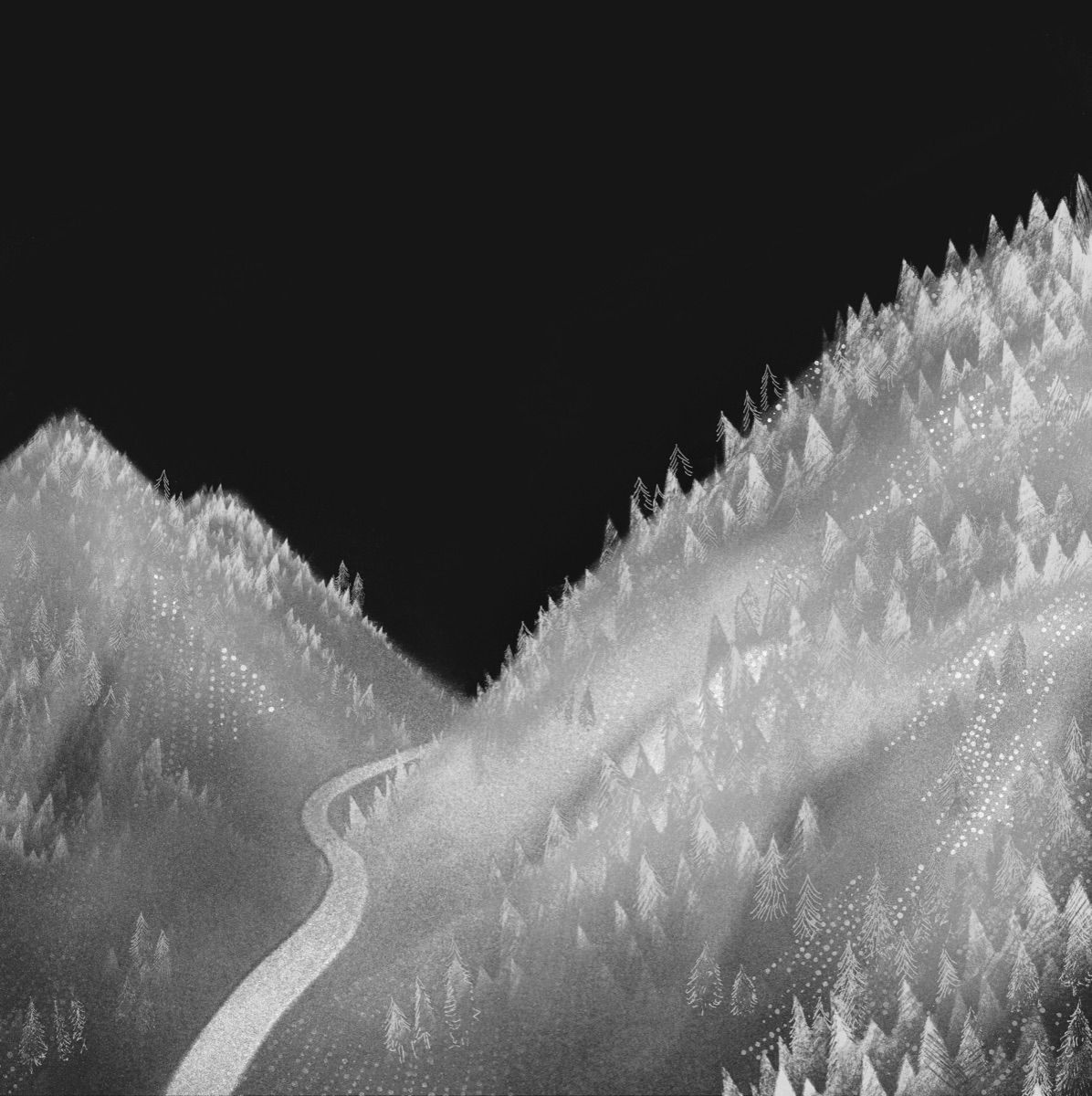
This model represents only those points which have reflected from the ground. These models exclude all vegetation and structures. They are often used for archaeological prospecting and mining explorations.
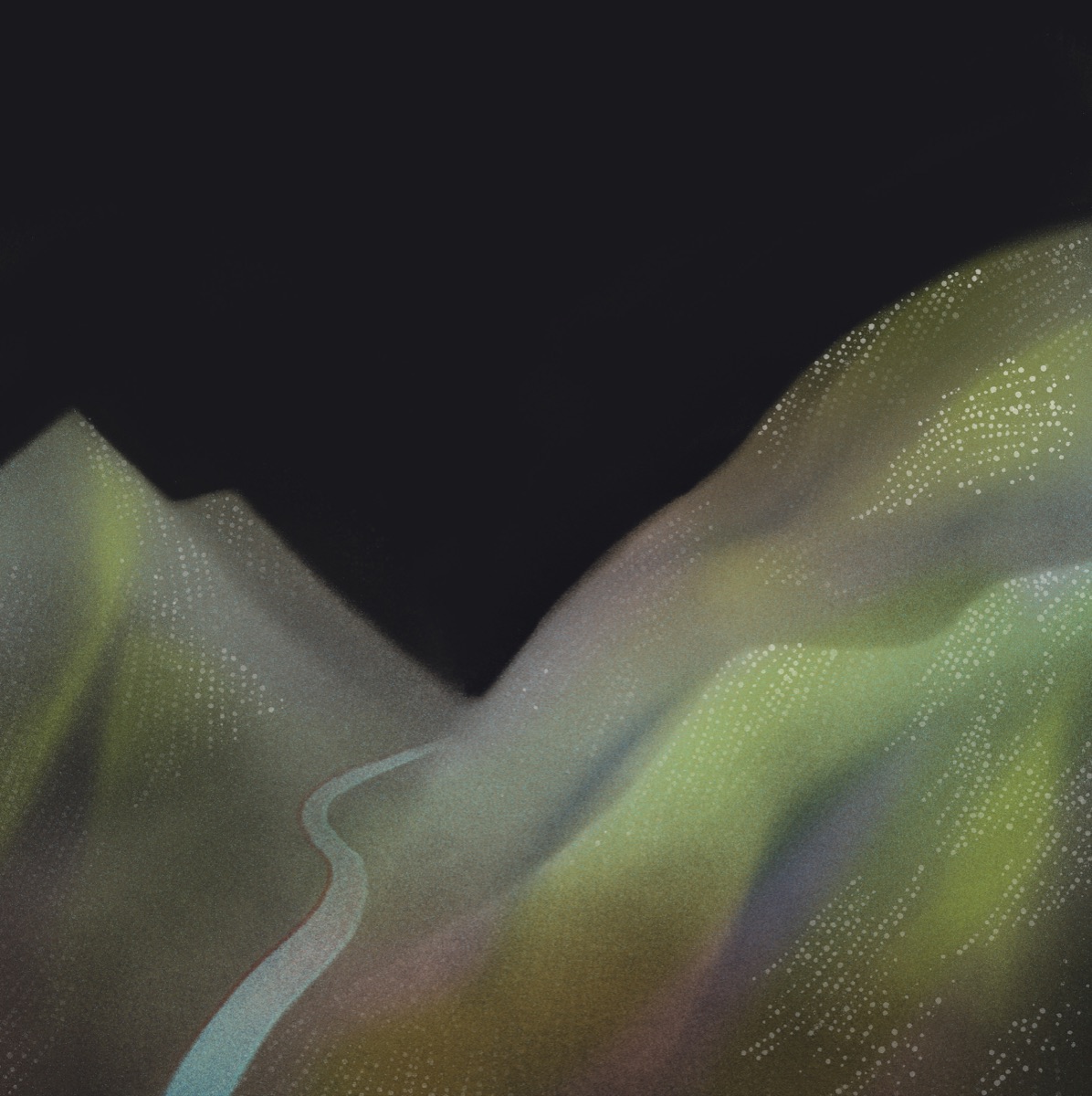
This model represents only points reflected from forest canopy, and represents the height of the forest canopy. These models are often used alongside ecological information to estimate biomass from a particular forest space. A forest canopy's volume and mass are often used in the development of so-called 'carbon markets.'
Once rasterised, for ease of viewing there are also many options for visualising point clouds in ways which bring landscape features into dramatic relief. But, individual features of a landscape can also be found and separated from the larger point cloud. For example: a single tree, an archaeological formation, a building, or a road.
While each represents a widely used technique in point cloud analysis, the nature of such analysis varies significantly depending on the analyst's relationship to the landscape reflected. Notably, these methods were developed primarily by specialists focused on archaeological prospection, or the calculation of forest biomass. Such applications, however, reflect a narrow subset of the many ways in which landscapes can be related to.

Lidar as a technology has been around since the 1960s. But the use of this technology only emerged widely above forest areas in the early 2000s, alongside the digital point cloud's data standardisation around formats such as LAS (.las) and the compressed LAZ (.laz) file format for storage, exchange, and archiving. As digital files, the Lidar point cloud can be created, examined and analysed far away from the original landscapes of reflection.
Point clouds can also be stored, shared, and reanalysed long after the initial Lidar survey. Lidar point clouds are often created in forest surveys organised by governments, universities, Non-Governmental Organisations (NGOs), and companies involved in mining, agriculture, or electric utilities.
Crucially, if accessible, the resulting Lidar point clouds can be reanalysed in the future, for entirely different purposes and by entirely different organisations or people.
If available for download on public websites, stored in institutional archives, or discovered on personal devices, point clouds may then be unpredictably reanalysed far into the future. The practice of point cloud 'reanalysis' refers to the analysis of Lidar point clouds for new interests in the landscape reflected and recorded by a Lidar system for distinct interests or contexts. A point cloud created in a few hours in the year decades ago to analyse landslide risks to a community, for example, may be re-analysed at present to search for archaeological ruins, monitor deforestation, or even prospect for mineral resources. Importantly, point clouds on older digital recording formats such as magnetic tapes, have been shown to be convertible to new data formats. Any point cloud found may then prove reanalysable by ever evolving techniques of analysis developed for these modern data formats.
The reanalysis described above can occur at any time, if point clouds have been recovered following their original analysis. A Lidar point cloud may be sought out specifically, as it offers both detailed reflections of landscape, and the reflection and representation of spaces under tree canopies.
Communities are often not told when their land is scanned for a Lidar survey, let alone when, where, and how these point clouds are later reanalysed. This means these detailed visualisations of landscape can be reinterpreted without community input long into the future.
Reanalysis is not just a possibility. It's already happening.
The prospection of point clouds created in the past for new and emergent interests in landscape has been documented in forest areas around the world, many years after their initial time of reflection.
The following cases involve the reanalysis of point clouds produced by aerial Lidar systems, from two different regions of Central America. This reanalysis occurred years after reflections from each of these landscapes were originally collected, recorded, and arranged into Lidar point clouds.
In 2000, a U.S. agency, the 'Bureau of Economic Geology' (BEG) funded a series of plane-based Lidar surveys across Honduras. The purpose of these surveys was described as the assessment of flood damage in the country following the powerful hurricane 'Mitch', which occurred in 1998. After the project was complete, the point clouds from this project were stored on magnetic tapes in BEG archives. In 2017, researchers from the University of Houston sought out these point clouds for a virtual archaeological prospecting project. Once researchers found the magnetic tape archive where the Lidar point cloud data had been stored years earlier, they reprocessed the point clouds to current digital filing formats. They then analysed these point clouds for signs of potential archaeological sites reflected at the time of survey. The researchers used both their eyes and point cloud analysis to spot archaeological sites virtually within these point clouds. The researchers then visited the sites reflected 17 years prior, assessed the state of the archaeological sites, and shared their findings with the Honduran authorities.
Fernandez-Diaz, J. C., & Cohen, A. S. (2020). Whose data is it anyway? Lessons in data management and sharing from resurrecting and repurposing Lidar data for archaeology research in Honduras. Journal of Computer Applications in Archaeology, 3(1), 122–134. https://doi.org/10.5334/jcaa.51
In 2013, a United Nations forest-monitoring program used Lidar to scan 122 km² of tropical forest in Campeche, Mexico. Eleven years later, in 2024, a U.S.-based archaeologist found the point clouds downloadable online. Once again, the researcher sought out the point clouds created in the original UN Lidar survey for a very different interest in the area reflected. They then downloaded and reanalysed them on a software program, creating a 'Digital Terrain Model' from the point cloud to ease the virtual identification of archaeological sites. This model's visualisation of the ground under forest canopy in Campeche allowed them to spot material culture reflected in the original point cloud created in the UN survey.
Auld-Thomas, L., Canuto, M. A., Morlet, A. V., et al. (2024). Running out of empty space: Environmental Lidar and the crowded ancient landscape of Campeche, Mexico. Antiquity, 98(401), 1340–1358. https://doi.org/10.15184/aqy.2024.148
Whether found downloadable on an online portal, or stored in an archive, point clouds may be accessed years after their creation. Interaction with them may also occur far away from the landscape itself, as digital point cloud files may be shared and/or accessed across the world.
Places and features reflected in point clouds created in the past may then draw later interest in the same landscapes in the present. This may occur if the person, group, company, or agency interested in them wishes to locate and access them within the present landscape. This may lead to unforeseen present and future consequences for those who call landscapes reflected in point clouds home. How Lidar point clouds are managed and archived, and who can access them, is then a crucial question.

The initial remote nature of reanalysis can leave local decisions and permissions around how forest spaces are accessed, managed, and interpreted more easily ignored, as Lidar point clouds are increasingly relied upon to govern and monitor forest spaces. This may be hugely consequential for not only the landscapes reflected, but communities living in or around them.
Below are some questions you may want to keep in mind when Lidar surveys are proposed in or around your community. These questions explore how the point cloud will be stored, guide considerations of what purposes surveys may be sought, and probe the likelihood of point clouds being reanalysed in the future.
Who will have access to the point cloud data?
Will it be published online?
Will it be stored in a private archive?
How will point cloud data be recorded and stored?
Who, or which institutions, will be in charge of these decisions?
Will there be shared ownership agreements for Lidar data, co-created with communities local and indigenous to the forest areas surveyed?
Who will analyse the point cloud? How?
How will access be determined? Will communities living in or adjacent to the landscape reflected have access to the point cloud?
Who will be included in the interpretation of what is analysed in the point cloud?
Will the point cloud be reused for new purposes of analysis, such as archaeological prospection, or the measurement of a forest's carbon stock?
Will reanalysis be done with community consent, and according to clear conditions of the point cloud data's reanalysis?
Are there any limits to how the point cloud will be accessible online for download or stored in archives?
Digital colonialism foregrounds the collection and management of Lidar point clouds, digital colonialism defined as the:
"...various inequalities in relation to the internet and other digital technologies and resources between the global 'north' and 'south.' English remains the primary language of most software programs and websites; the global north profits from data harvesting information from the global south; and most software and technological infrastructure is produced in the global north, thus shaping how the global south uses technology."— Thompson, E. L. (2017) Legal and Ethical Considerations for Digital Recreations of Cultural Heritage, 20 Chap. L. Rev. 153.
The inequalities highlighted above may raise concerns about inequalities in the management and access to point clouds after a Lidar survey. Depending on which institution or company manages access to a point cloud, how this data is stored and who can access it will vary deeply. This may motivate communities living in or around the spaces reflected to open dialogues with those who control this access, interaction, and storage.
Efforts to reclaim a community's right to control the production, storage and/or distribution of Lidar point clouds can be understood as movements towards a community's 'data sovereignty.' This term broadly describes the control of protocols around recording, sharing, and accessing data made from or about one's community. Priorities over the type of data a community wishes to exercise 'data sovereignty' over, and how they wish to do so will vary dramatically from community to community.
As highlighted previously in the Campeche reanalysis case, while some point clouds may remain accessible only to those working with or within the companies or the institutions storing them, others may be openly downloadable online.
If data reclamation is not possible, local input into how point cloud data is managed may be pursued. Beginning conversations about how community input into the distribution and use of point cloud data may involve contacting the institutions or companies which hold the data.
Crucially, if the reclamation of point cloud data is pursued, the goals of community reclamation may range drastically case by case; shared access or access to copies of point cloud data may be one path towards reclamation, while the full control over the access, analysis, and distribution of point clouds may be another path to exercising reclamation.
With this in mind, free, and increasingly user-friendly methods of viewing and analysing point clouds from one's computer are growing.
Web-based point cloud viewers such as Potree allow one to stream Lidar point clouds in three-dimensions for web-based viewing of the Lidar point cloud.
Further, the open-source and open-access point cloud processing program CloudCompare offers user-friendly point cloud analysis. It allows one to not only see the point cloud visualised in three-dimensions, but to separate reflections from the larger point cloud. This, for example, could allow the separation of the under-canopy floor reflections of a forest area into the aforementioned Digital Terrain Model, or the representation of a particular area of tree canopy of interest.
One may also use CloudCompare to make details of the point cloud easier to see and relate to. This may be achieved by creating a 'Hillshade'. This tool allows users to create and change the virtual light-source position (sun direction) in the virtual environment to further highlight details in the point cloud through shadow-based shading.
Using programs like CloudCompare requires one to follow online tutorials, as analysing the point cloud requires more steps than streaming point cloud datasets. This program offers many different language settings, including Spanish.
Exploring each of these methods may open local interaction with point clouds, but it is important to remember some Lidar point clouds can be incredibly dense. Depending on the type of point cloud, the point density of the point cloud and the size of the survey area, these datasets may comprise many gigabytes to several terabytes of data. This means downloading a point cloud may take many hours and require a steady internet connection. The size of the dataset will then depend not only on the size of the landscape surveyed, but also density of reflections in the point cloud. Point clouds may also be interacted with in smaller sections to ease their download and interaction.
Notably, some analysts can automate the detection of particular landscape features and objects within the point cloud's representation of landscape using machine learning techniques. This demands significant training, powerful machines, programming expertise, and/or the purchase of software that is not licensed for open access.

If not downloadable online, to begin conversations about how point clouds may be accessed or reclaimed by community members, contact could be initiated with institutions or companies that control a point cloud's storage, analysis, and access.
If successful, the long-term storage of point cloud datasets may be a formidable challenge locally. This can be a particular challenge in areas which face everyday heat, humidity and power instability, conditions that disproportionately affect local stewardship of this data for those living in tropical and sub-tropical environments.
Below are local options for storing point clouds, each of which vary by price and archival stability. Cloud-based storage is also an option for point cloud data, though it depends on recurring subscriptions and data storage infrastructures subject to terms of access determined by the storage provider.
| Solid State Drive (SSD) | Hard Disk Drive (HDD) | |
|---|---|---|
| Description | Portable external hard drive with USB-C and Thunderbolt access | Portable external hard drive with USB-C and Thunderbolt access |
| Cost | ~USD $80 per terabyte | ~USD $50 per terabyte |
| Pros |
Highly portable Fast data access |
Highly portable Lower upfront cost compared to SSDs Longer average lifespan than SSDs (often over 10 years) |
| Cons |
Vulnerable to 'data fade' due to humidity and heat (electric charge based data recording) Lower archival lifespan compared to HDDs (up to 10 years) |
Susceptible to physical damage if dropped due to internal moving parts Slow access to data |
"After all, aren't they talking about producing a 'vision machine' in the near future, a machine that would be capable not only of recognising the contours of shapes, but also of completely interpreting the visual field, of staging a complex environment close-up or at a distance?" — Paul Virilio, The Vision Machine (1994, 59)
Comprender la tecnología Lidar y el reanálisis de la 'nube de puntos' Lidar
El diseño y la producción de este folleto fueron posibles gracias a la financiación del Consejo de Investigación en Artes y Humanidades del Reino Unido, proporcionada como parte de una beca doctoral CHASE otorgada a la investigadora doctoral en Política de Goldsmiths, Emily Gresham Beamer. El diseño y la ilustración del folleto fueron creados por Emily Cox Illustrations.
Este folleto se comparte bajo una licencia Creative Commons Atribución-NoComercial 4.0 Internacional.
El Lidar aéreo (Light Detection and Ranging) es una tecnología de mapeo basada en la reflexión de la luz que puede instalarse en drones, aviones y, en algunos casos, satélites. Cuando los sistemas Lidar se colocan en vehículos aéreos sobre un paisaje, pueden crear una imagen tridimensional del mismo compuesta por puntos de reflexión de la luz. Las reflexiones Lidar también pueden trazar carreteras, ríos, senderos y estructuras construidas por el ser humano que no son visibles en fotografías aéreas.
Este folleto explica:
La Detección y Medición por Luz, o "Lidar", es la práctica de enviar pulsos de luz hacia una superficie remota y detectar la reflexión de ese pulso cuando rebota hacia arriba tras impactar en una superficie. Los sistemas Lidar pueden registrar el tiempo que tarda cada pulso de luz en regresar al sensor del sistema Lidar aéreo. El tiempo que tarda cada pulso en volver al sensor se utiliza para calcular la distancia entre el sistema Lidar y la superficie desde la cual la luz se refleja. Esto se registra junto con una medición de la cantidad, o intensidad, de la energía luminosa que regresa con cada pulso.
Cuando los sistemas de Lidar aéreo operan sobre paisajes, las superficies del terreno, incluido el suelo, pueden ser detectadas desde el aire sin necesidad de acceder físicamente al área. Estas reflexiones pueden provenir de muchas superficies distintas: hojas y ramas de árboles, el suelo, edificios o estructuras pequeñas, y elementos del paisaje bajo el dosel, como grietas y cuevas. Aunque copas de árboles muy densas pueden dificultar la detección del suelo, en la mayoría de las zonas forestales los sistemas Lidar pueden registrar reflexiones por debajo del dosel.
Se puede crear un modelo altamente detallado de un área cuando todas estas reflexiones se recopilan y se organizan en tres dimensiones basándose en cálculos de distancia derivados del tiempo. En conjunto, estas reflexiones forman una representación tridimensional del paisaje conocida como "nube de puntos", ya que cada reflexión se registra como un "punto" en el espacio.
Estos pulsos de luz son extremadamente rápidos. Los sistemas Lidar modernos pueden emitir desde decenas de miles hasta más de un millón de pulsos por segundo, dependiendo del sistema. Cuando estos millones de puntos de reflexión se organizan en una nube de puntos, se obtiene una representación muy detallada del paisaje que puede visualizarse e incluso analizarse de forma remota.
La tridimensionalidad de la nube de puntos es posible porque se registra el tiempo de cada reflexión para calcular la distancia según el tiempo que tarda la luz en reflejarse y regresar al sistema. El sensor registra tanto la posición de cada punto como la intensidad de la luz reflejada desde la superficie. Esta intensidad puede aportar información sobre las características de la superficie que refleja la luz. Un análisis posterior permite clasificar cada punto según el tipo de superficie, como vegetación, estructuras, terreno o cuerpos de agua.
De forma crucial, estas nubes de puntos tridimensionales pueden incluir reflexiones provenientes de áreas que antes estaban ocultas en imágenes aéreas por el dosel de los árboles. El sistema Lidar emite luz pulsada que puede propagarse hacia abajo a medida que se divide y se refleja en múltiples superficies. Luego, la luz puede atravesar el dosel forestal y reflejarse de regreso desde el suelo.
Los retornos se ordenan según el tiempo que tardan en volver al sensor. El primer retorno suele representar la superficie más alta, mientras que los retornos posteriores pueden corresponder a vegetación más baja o al suelo.
Gracias a esto, la forma del terreno, el rastro de senderos, zonas despejadas de vegetación e incluso elementos arqueológicos bajo el dosel forestal pueden aparecer representados virtualmente en la nube de puntos.
Los puntos de reflexión en una nube de puntos pueden separarse según el objeto, el tipo de superficie y la altura a la que se reflejan. Esto suele realizarse mediante la aplicación de una serie de operaciones algorítmicas sobre la nube de puntos. Otro proceso común en el análisis de nubes de puntos Lidar es la reproyección de la distribución, a menudo agrupada e irregular, de los puntos en una cuadrícula regularmente espaciada. Estos modelos se conocen como modelos Lidar "rasterizados". A continuación, se presentan dos ejemplos comunes creados de esta manera:
Este modelo representa únicamente los puntos que se han reflejado desde el suelo. Excluye toda la vegetación y las estructuras. Se utiliza con frecuencia en la prospección arqueológica y en la exploración minera.
Este modelo representa únicamente los puntos reflejados desde el dosel forestal y muestra la altura del mismo. Estos modelos se utilizan a menudo junto con información ecológica para estimar la biomasa de un área forestal. El volumen y la masa del dosel se emplean con frecuencia en el desarrollo de los llamados "mercados de carbono".
Una vez rasterizadas, existen muchas opciones para visualizar las nubes de puntos de manera que las características del paisaje se resalten con gran claridad. Sin embargo, también es posible identificar y separar elementos individuales dentro de la nube de puntos más amplia. Por ejemplo: un árbol específico, una formación arqueológica, un edificio o una carretera.
Aunque cada una de estas técnicas se utiliza ampliamente en el análisis de nubes de puntos, la naturaleza de dicho análisis varía considerablemente según la relación del analista con el paisaje representado. Cabe destacar que estos métodos fueron desarrollados principalmente por especialistas enfocados en la prospección arqueológica o en el cálculo de la biomasa forestal. No obstante, estas aplicaciones representan solo una parte limitada de las múltiples formas en que los paisajes pueden ser comprendidos y relacionados.
La tecnología Lidar existe desde la década de 1960. Sin embargo, su uso generalizado sobre áreas forestales surgió a principios de los años 2000, junto con la estandarización de los datos de nubes de puntos en formatos como LAS (.las) y el formato comprimido LAZ (.laz) para su almacenamiento, intercambio y archivo. Como archivos digitales, las nubes de puntos Lidar pueden examinarse y analizarse lejos de los paisajes originales donde se registraron las reflexiones.
Las nubes de puntos también pueden almacenarse, compartirse y reanalizarse mucho tiempo después del estudio Lidar inicial. A menudo se generan en estudios forestales organizados por gobiernos, universidades, organizaciones no gubernamentales (ONG) y empresas relacionadas con la minería, la agricultura o los servicios eléctricos.
De manera crucial, si son accesibles, las nubes de puntos Lidar resultantes pueden ser reanalizadas en el futuro con fines completamente distintos y por organizaciones o personas diferentes.
Si están disponibles para su descarga en sitios web públicos, almacenadas en archivos institucionales o encontradas en dispositivos personales, las nubes de puntos pueden ser reanalizadas de manera impredecible en el futuro. La práctica del "reanálisis" de nubes de puntos se refiere al estudio de datos Lidar para nuevos intereses sobre el paisaje que fue registrado, en contextos distintos a los originales.
Por ejemplo, una nube de puntos creada en unas pocas horas hace décadas para analizar riesgos de deslizamientos de tierra en una comunidad podría hoy reanalizarse para buscar ruinas arqueológicas, monitorear la deforestación o incluso explorar recursos minerales.
Es importante destacar que incluso las nubes de puntos descubiertas en antiguas cintas magnéticas han sido convertidas a nuevos formatos de datos como LAS. Por lo tanto, cualquier nube de puntos recuperada puede resultar susceptible de reanálisis mediante técnicas cada vez más avanzadas desarrolladas para estos formatos modernos.
El reanálisis descrito anteriormente puede ocurrir en cualquier momento, siempre que las nubes de puntos se hayan recuperado tras su análisis original. Una nube de puntos Lidar puede buscarse específicamente, ya que ofrece tanto reflejos detallados del paisaje como la reflexión y representación de espacios bajo las copas de los árboles.
A menudo, a las comunidades no se les informa cuando su tierra es escaneada para un estudio Lidar, y mucho menos cuándo, dónde y cómo estas nubes de puntos son posteriormente reanalizadas. Esto significa que estas visualizaciones detalladas del paisaje pueden reinterpretarse sin la participación de la comunidad mucho tiempo después.
El reanálisis no es solo una posibilidad. Ya está ocurriendo. La prospección de nubes de puntos creadas en el pasado para nuevos intereses emergentes en el paisaje ha sido documentada en áreas forestales alrededor del mundo, muchos años después de su momento inicial de captura.
Los siguientes casos implican el reanálisis de nubes de puntos producidas por sistemas Lidar aerotransportados, de dos regiones diferentes de Centroamérica. Este reanálisis ocurrió años después de que las reflexiones de cada uno de estos paisajes fueran originalmente recopiladas, registradas y organizadas en nubes de puntos Lidar.
En el año 2000, una agencia de Estados Unidos, el "Bureau of Economic Geology" (BEG), financió una serie de estudios Lidar aerotransportados en Honduras. El propósito de estos estudios se describió como la evaluación de los daños causados por inundaciones en el país tras el poderoso huracán "Mitch", ocurrido en 1998. Una vez completado el proyecto, las nubes de puntos generadas fueron almacenadas en cintas magnéticas en los archivos del BEG.
En 2017, investigadores de la Universidad de Houston buscaron estas nubes de puntos para un proyecto de prospección arqueológica virtual. Una vez que encontraron el archivo en cinta magnética donde los datos Lidar habían sido almacenados años antes, reprocesaron las nubes de puntos a formatos digitales actuales. Posteriormente, analizaron estas nubes de puntos en busca de indicios de posibles sitios arqueológicos reflejados en el momento del estudio.
Los investigadores utilizaron tanto la observación visual como el análisis de las nubes de puntos para identificar virtualmente sitios arqueológicos dentro de estos datos. Luego visitaron los lugares reflejados 17 años antes, evaluaron el estado de los sitios arqueológicos y compartieron sus hallazgos con las autoridades hondureñas.
Fernandez-Diaz, J. C., & Cohen, A. S. (2020). Whose data is it anyway? Lessons in data management and sharing from resurrecting and repurposing Lidar data for archaeology research in Honduras. Journal of Computer Applications in Archaeology, 3(1), 122–134. https://doi.org/10.5334/jcaa.51
En 2013, un programa de monitoreo forestal de las Naciones Unidas utilizó Lidar para escanear 122 km² de selva tropical en Campeche, México. Once años después, en 2024, un arqueólogo con sede en Estados Unidos encontró las nubes de puntos disponibles para su descarga en línea.
Una vez más, el investigador buscó las nubes de puntos creadas en el estudio Lidar original de la ONU, pero con un interés muy diferente sobre el área reflejada. Luego las descargó y las reanalizó mediante un programa informático, creando un "Modelo Digital del Terreno" a partir de la nube de puntos para facilitar la identificación virtual de sitios arqueológicos.
La visualización de este modelo del suelo bajo la cubierta forestal en Campeche permitió identificar evidencias de cultura material que ya estaban reflejadas en la nube de puntos original generada durante el estudio de la ONU.
Auld-Thomas, L., Canuto, M. A., Morlet, A. V., et al. (2024). Running out of empty space: Environmental Lidar and the crowded ancient landscape of Campeche, Mexico. Antiquity, 98(401), 1340–1358. https://doi.org/10.15184/aqy.2024.148
Ya sea que se encuentren disponibles para descarga en un portal en línea o almacenadas en un archivo, las nubes de puntos pueden ser accesadas años después de su creación. La interacción con ellas también puede ocurrir lejos del propio paisaje, ya que los archivos digitales de nubes de puntos pueden compartirse y/o consultarse en todo el mundo.
Los lugares y características reflejados en nubes de puntos creadas en el pasado pueden despertar un interés posterior en esos mismos paisajes en el presente. Esto puede ocurrir si una persona, grupo, empresa o agencia interesada desea localizarlos y acceder a ellos dentro del paisaje actual. Esto puede dar lugar a consecuencias imprevistas en el presente y el futuro para quienes consideran hogar a los paisajes reflejados en esas nubes de puntos.
Por lo tanto, cómo se gestionan y archivan las nubes de puntos Lidar, y quién puede acceder a ellas, se convierte en una cuestión crucial.
La naturaleza inicialmente remota del reanálisis puede hacer que las decisiones locales y los permisos sobre cómo se accede, gestiona e interpreta el espacio forestal se pasen por alto con mayor facilidad, a medida que las nubes de puntos Lidar se utilizan cada vez más para gobernar y monitorear estos espacios. Esto puede tener consecuencias significativas no solo para los paisajes reflejados, sino también para las comunidades que viven en ellos o a su alrededor.
A continuación, se presentan algunas preguntas que conviene tener en cuenta cuando se propongan estudios Lidar en su comunidad o en sus alrededores. Estas preguntas exploran cómo se almacenará la nube de puntos, orientan la reflexión sobre los posibles usos de los estudios y examinan la probabilidad de que las nubes de puntos sean reanalizadas en el futuro.
¿Quién tendrá acceso a los datos de la nube de puntos?
¿Se publicarán en línea?
¿Se almacenarán en un archivo privado?
¿Cómo se registrarán y almacenarán los datos de la nube de puntos?
¿Quién o qué instituciones estarán a cargo de estas decisiones?
¿Existirán acuerdos de propiedad compartida de los datos Lidar, co-creados con las comunidades locales e indígenas de las áreas forestales estudiadas?
¿Quién analizará la nube de puntos? ¿Cómo?
¿Cómo se determinará el acceso? ¿Las comunidades que viven en el paisaje reflejado o en sus alrededores tendrán acceso a la nube de puntos?
¿Quién será incluido en la interpretación de lo que se analice en la nube de puntos?
¿Se reutilizará la nube de puntos para nuevos fines de análisis, como la prospección arqueológica o la medición del carbono almacenado en el bosque?
¿Se llevará a cabo el reanálisis con el consentimiento de la comunidad y de acuerdo con condiciones claras sobre su uso?
¿Existen límites sobre cómo la nube de puntos será accesible en línea para su descarga o almacenada en archivos?
El colonialismo digital pone en primer plano la recopilación y gestión de nubes de puntos Lidar; el colonialismo digital se define como:
"...las diversas desigualdades en relación con internet y otras tecnologías y recursos digitales entre el 'norte' y el 'sur' global. El inglés sigue siendo el idioma principal de la mayoría de los programas de software y sitios web; el norte global obtiene beneficios de la extracción de datos del sur global; y la mayor parte del software y la infraestructura tecnológica se produce en el norte global, lo que influye en la manera en que el sur global utiliza la tecnología."— Thompson, E. L. (2017) Legal and Ethical Considerations for Digital Recreations of Cultural Heritage, 20 Chap. L. Rev. 153.
Las desigualdades señaladas anteriormente pueden generar preocupaciones sobre las desigualdades en la gestión y el acceso a las nubes de puntos después de un estudio Lidar. Dependiendo de qué institución o empresa gestione el acceso a una nube de puntos, la forma en que estos datos se almacenan y quién puede acceder a ellos puede variar considerablemente. Esto puede motivar a las comunidades que viven en o alrededor de los espacios reflejados a entablar diálogos con quienes controlan este acceso, interacción y almacenamiento.
Los esfuerzos por recuperar el derecho de una comunidad a controlar la producción, el almacenamiento y/o la distribución de las nubes de puntos Lidar pueden entenderse como movimientos hacia la "soberanía de los datos" de una comunidad. Este término describe, de manera general, el control sobre los protocolos de registro, intercambio y acceso a los datos generados por o sobre una comunidad. Las prioridades respecto al tipo de datos sobre los cuales una comunidad desea ejercer esta soberanía, y la forma de hacerlo, variarán considerablemente de una comunidad a otra.
Como se destacó anteriormente en el caso de reanálisis en Campeche, mientras que algunas nubes de puntos pueden permanecer accesibles solo para quienes trabajan dentro de las empresas o instituciones que las almacenan, otras pueden estar disponibles para descarga abierta en línea.
Si la recuperación de los datos no es posible, se puede buscar la participación local en la manera en que se gestionan los datos de nubes de puntos. Iniciar conversaciones sobre cómo integrar la participación comunitaria en la distribución y el uso de estos datos puede implicar contactar a las instituciones o empresas que los poseen.
Es fundamental señalar que, si se persigue la recuperación de los datos de nubes de puntos, los objetivos de esta recuperación pueden variar ampliamente según el caso; el acceso compartido o la obtención de copias de los datos puede ser un camino, mientras que el control total sobre el acceso, el análisis y la distribución de las nubes de puntos puede ser otro.
Con esto en mente, están creciendo los métodos gratuitos y cada vez más accesibles para visualizar y analizar nubes de puntos desde un ordenador.
Los visores de nubes de puntos basados en la web, como Potree, permiten transmitir nubes de puntos Lidar en tres dimensiones para su visualización directamente en el navegador.
Además, el programa de procesamiento de nubes de puntos de código abierto y acceso libre CloudCompare ofrece herramientas accesibles para su análisis. Permite no solo visualizar la nube de puntos en tres dimensiones, sino también separar reflejos dentro del conjunto de datos. Esto, por ejemplo, puede facilitar la separación de los reflejos del suelo bajo la cubierta forestal para generar un Modelo Digital del Terreno, o aislar áreas específicas del dosel arbóreo de interés.
También es posible utilizar CloudCompare para hacer que los detalles de la nube de puntos sean más visibles y fáciles de interpretar. Esto puede lograrse mediante la creación de un "hillshade". Esta herramienta permite a los usuarios crear y modificar la posición de una fuente de luz virtual (dirección del sol) en el entorno digital, resaltando así detalles mediante sombras dentro de la visualización de la nube de puntos.
El uso de programas como CloudCompare requiere seguir tutoriales en línea, ya que el análisis de nubes de puntos implica más pasos que simplemente visualizar los datos en streaming. Este programa ofrece múltiples configuraciones de idioma, incluido el español.
Explorar estos métodos puede facilitar una interacción local con las nubes de puntos, pero es importante tener en cuenta que algunos conjuntos de datos Lidar pueden ser extremadamente densos. Dependiendo del tipo de nube de puntos, su densidad y el tamaño del área estudiada, estos archivos pueden ocupar desde varios gigabytes hasta varios terabytes. Esto significa que descargar una nube de puntos puede tomar muchas horas y requerir una conexión a internet estable. El tamaño del conjunto de datos dependerá no solo de la extensión del paisaje analizado, sino también de la densidad de los reflejos registrados. Para facilitar su uso, las nubes de puntos también pueden dividirse en secciones más pequeñas para su descarga e interacción.
Cabe destacar que algunos analistas pueden automatizar la detección de características y objetos del paisaje dentro de la nube de puntos mediante técnicas de aprendizaje automático. Sin embargo, esto requiere una formación considerable, equipos informáticos potentes, conocimientos de programación y/o el uso de software que no siempre es de acceso abierto.
Si no están disponibles para descarga en línea, para iniciar conversaciones sobre cómo las nubes de puntos pueden ser accedidas o recuperadas por miembros de la comunidad, se puede establecer contacto con las instituciones o empresas que controlan su almacenamiento, análisis y acceso.
Si tiene éxito, el almacenamiento a largo plazo de conjuntos de datos de nubes de puntos puede ser un desafío considerable a nivel local. Esto puede ser especialmente difícil en zonas que enfrentan calor, humedad e inestabilidad eléctrica en el día a día, condiciones que afectan de manera desproporcionada la gestión local de estos datos por parte de quienes viven en entornos tropicales y subtropicales.
A continuación, se presentan opciones locales para almacenar nubes de puntos, cada una con distintos niveles de costo y estabilidad de archivo. El almacenamiento en la nube también es una opción para los datos de nubes de puntos, aunque depende de suscripciones recurrentes e infraestructuras de almacenamiento de datos sujetas a los términos de acceso establecidos por el proveedor del servicio.
| Unidad de estado sólido (SSD) | Disco duro (HDD) | |
|---|---|---|
| Descripción | Unidad externa portátil con acceso USB-C y Thunderbolt | Unidad externa portátil con acceso USB-C y Thunderbolt |
| Costo | Aproximadamente 80 USD por terabyte | Aproximadamente 50 USD por terabyte |
| Ventajas |
Muy portátil Acceso rápido a los datos |
Muy portátil Menor costo inicial que los SSD Mayor vida útil promedio que los SSD (a menudo más de 10 años) |
| Desventajas |
Mayor costo inicial en comparación con los HDD Vulnerable a la "pérdida de datos" por humedad y calor (almacenamiento basado en carga eléctrica) Vida útil de archivo más corta que los HDD (aprox. hasta 10 años) |
Susceptible a daños físicos si se cae debido a partes internas móviles Acceso más lento a los datos |
"Después de todo, ¿no se habla de producir una 'máquina de visión' en un futuro cercano, una máquina capaz no solo de reconocer los contornos de las formas, sino también de interpretar por completo el campo visual, de poner en escena un entorno complejo, ya sea de cerca o a distancia?" — Paul Virilio, La máquina de visión (1994, 59)